
The article shows that there is an almost constant need in using icebreakers when creating marine transport systems focused on the export of hydrocarbon raw materials to the East. The authors describe main methods of pilotage of heavy-tonnage ice vessels by icebreakers. The features of using these methods are described.
Keywords: heavy-tonnage vessel, icebreaker, ice channel, ship escorting in ice, ship speed
Theoretically, there are several scenarios for using heavy-tonnage vessels in freezing waters in marine transport systems, including in the Arctic seas. The main difference between these scenarios is the degree of independent navigation of a heavy-tonnage vessel in ice. It is possible to imagine a transport system based on the almost constant independent navigation of a heavy-tonnage vessel in ice conditions. It is also quite likely that the transport system, which is based on the powerful icebreaker fleet, and the movement of a heavy-tonnage vessel in ice conditions is mainly carried out while piloted or escorted by an icebreaker. The choice of a particular transport system largely determines the requirements for design of the heavy-tonnage vessel.
The main directions of LNG export from the Russian Arctic. When choosing a concept and, consequently, approaches for the design of a heavy-tonnage ice vessel, an important role is played by the strategy for the development of the transport system in which it is supposed to be used. Currently, the main shipping terminals for hydrocarbon raw materials are located in the bays of the Kara sea. Possible directions of transportation of the extracted products are shown in Fig. 1.

Fig. 1. The marine transport system of Russia
For the LNG transport systems that were considered until recently, the Western direction of transportation was the main one, focused on the European gas terminals. This orientation of transport systems imposed several requirements for the ice worthiness and seaworthiness of heavy-tonnage ships carrying LNG. The main requirements were:
- maximum enhancement of the possibility of independent navigation of heavy-tonnage vessels in ice conditions;
- ensuring high performance on clean water.
These requirements were determined by two major factors. This was a relatively short navigation distance of a heavy-tonnage vessel in ice conditions, and this navigation should not be carried out in the most severe seas of the Western sector of the Russian Arctic. The greatest ice difficulties could occur only when crossing the Kara sea during the high period of ice cover development from March to May. It should be noted that the seas of the Western sector are the most studied in terms of hydrology and ice regime, they have satellite information about the distribution of ice, and reliable forecasting methods have been also developed. The thickness of the thermal ice cover rarely exceeds 1.5 m. All this is superimposed by the general decrease of the Arctic sea ice, which has been observed recently. The analysis of combination of all these factors gave some reason to hope that the regime of independent navigation of heavy-tonnage vessels in the Western sector would be the main one.
The second important factor is the relatively short length of the route from the ice edge to the European ports, such as Rotterdam, for example. This allowed to hope for the economic feasibility of transporting hydrocarbons by one vessel to the port of destination without intermediate transshipment and ensuring the necessary rhythm of deliveries cycle. In case of possible violations of the schedule of movement of heavy-tonnage vessel in ice conditions, it is almost always possible to make up for lost time on clean water, using the available power reserve.
An attempt to meet the above requirements led the Finnish specialists to create the concept of double-acting ships (DAS), which were supposed to show good economic performance when navigating both on clean water and in ice. From the time of proclamation and until present moment, the concept of double-acting ships has undergone quite significant changes and is now practically reduced to providing increased icebreaking capability when astern moving. We are no longer talking about good indicators for clean water [2]. The first heavy-tonnage Arctic vessels created to meet the above requirements have already started operating in the Arctic as part of the Yamal LNG project (Fig.2). In total, 15 gas carriers will be built at the Daewoo Shipbuilding and Marine Engineering shipyard in South Korea to serve the needs of this Yamal LNG project. The vessels have the same deadweight of 85 thousand tons, a length of 295 m and a width of 50 m. The capacity of Yamalmax class gas carriers is 172.6 thousand cubic meters of gas.

Fig. 2. "Vladimir Rusanov", the Yamal Max type heavy-tonnage vessel for LNG transportation (photo by D.V. Labuzov, dmitry-v-ch-l.livejournal.com)
Recently, there has been an active discussion of the possibility of creating the marine transport system focused on the export of hydrocarbon raw materials from production areas in the Eastern direction to the Asia-Pacific region. The functioning conditions of the marine transport system in the Eastern sector of the Arctic are significantly more complex than the ones in the Western sector [5]. This circumstance imposes certain requirements on the composition of such transport system. First of all, it seems that the previously existed requirement for the possibility of active independent navigation of a heavy-tonnage gas carrier during year-round operation should be put off. This follows from the comparison of the length of route sections in ice conditions in the Eastern and Western directions. In addition, in all respects, the ice conditions in the Eastern sector of the Arctic are more severe. When moving eastwards, the probability of a dangerous situation occurring when a heavy-tonnage LNG vessel sails alone increases dramatically even in seasons with a light type of the Arctic navigation. Therefore, despite the high icebreaking capacity of modern gas carriers and successful examples of their independent navigation on the NSR, the involvement of icebreakers for the organization of year-round LNG transportation is one of the main tasks in the development of the marine transport system. In this case, there is an additional requirement for ensuring the average speed of ships during navigation. It must be at least 10 knots to ensure the rhythm of deliveries cycle [6].
Reorienting the export direction of products from West to East imposes certain requirements on the ice quality of icebreakers and heavy-tonnage vessels being the part of the transport system. For icebreakers, this is the ability to move at the specified speeds in ice with a thickness of 1.5 – 2.0 m. A new requirement is also imposed on heavy-tonnage vessels – the ability to move at the specified speeds in the channel behind the icebreaker. At the same time, depending on the ratio of the width of the hull of a heavy-tonnage vessel and an icebreaker, this channel can be "wide" or "narrow". A "wide" channel is formed when the icebreaker is leading, and its width is more than or approximately equal to the width of the vessel being piloted. In this case, the heavy-tonnage vessel practically does not interact with the edges of the channel, and its ice resistance is determined by the interaction with small-sized ice in the channel. A "narrow" channel occurs when the width of an LNG tanker is more than the width of the icebreaker piloting it. In this case, the ship is forced to break the edges of the channel with its hull. It is obvious that during this movement, part of the ship's hull interacts with solid ice, and part with broken ice, which, in the channel, is behind the icebreaker. It can be expected that the hull shape of the heavy-tonnage vessel, which was designed for independent navigation, will not be optimal for operating conditions in "wide" or "narrow" channels.
Interest in the use of heavy-tonnage vessels in the Eastern sector of the Arctic also arises from the problem of organizing a transport corridor linking Europe and Asia. Table 1 shows data from the Federal State Unitary Enterprise “Atomflot” on the distance and time spent on moving cargo from Murmansk to the main ports of the Pacific region, which demonstrate the attractiveness of such transportation. Further, we will discuss in more detail the features of navigation of heavy-tonnage vessels in ice when moving independently and under pilotage of icebreakers.
Table 1 - Distance and time spent on cargo transportation (at an average speed of 14.0 knots)
|
From Murmansk |
Via the Suez Сanal miles/days |
By the Northern Sea Route, miles/days |
|
Kobe (Japan) |
12291/36,6 |
6010/17,9 |
|
Busan (Korea) |
12266/36,5 |
6097/18,1 |
|
Ningbo (China) |
11848/35,3 |
6577/19,6 |
Methods of piloting heavy-tonnage vessels by icebreakers. The influence of the LNG export direction on the composition and operation of the marine transport system was discussed above. The sea transport systems, oriented to export LNG to the West, have been repeatedly analyzed (see, e.g., [2] and the given references), so it appears most relevant to consider in more detail the transport system, oriented to export LNG to the East.
The operation of such transport system, as well as system oriented in the Western direction, implies the possibility of independent navigation of heavy-tonnage vessels in the Eastern sector of the Russian Arctic. The difference is that such navigation is almost impossible during the period of maximum development of the ice cover. In addition, in seasons of hard and extreme type of navigation, independent navigation of heavy-tonnage vessels is likely to be impossible all year round. Thus, when using heavy-tonnage vessels in the Eastern sector of the Arctic, the role of the icebreaker fleet in the functioning of the marine transport system increases significantly.
The interaction of an icebreaker and a heavy-tonnage ice vessel is a new problem for marine ice engineering [7], which has become actively studied only recently. For a long time, the vast majority of experts believed that the main mode of movement of a heavy-tonnage vessel in ice was independent navigation, which was carried out when astern moving (double-action technologies, see, for example, work [8]). Therefore, most research was focused on the study of independent navigation of heavy-tonnage vessels in ice, including the mode of astern movement (see works [9], [10], etc.). A relatively small number of research works is devoted to the interaction of icebreaker with heavy-tonnage vessel.
A channel in the ice for piloting heavy-tonnage vessel can be made by one or two icebreakers. The features of interaction between a heavy-tonnage vessel and one icebreaker are determined by the ratio of the width of the vessel BS and the width of the channel made by icebreaker BС ≈ 1.1÷1.2B1, where B1 -is the width of the icebreaker. If BS ≤ BС, then the movement of a heavy-tonnage vessel does not formally differ from the movement of any vessel in the ice channel. Let us call this situation as the movement of the ship in a "wide" ice channel. In case BS > BС, a heavy-tonnage vessel has to destroy the edges of the channel with its hull during the movement. This movement is called a "narrow" channel movement.
When laying the ice channel with two icebreakers, a sufficiently wide channel can be formed, through which a heavy-tonnage vessel can freely move (Fig. 3). Such a channel can be created if the following condition is met: 1.1(B11 + B12) ≥ BS, i.e. the total width of the channels behind the two icebreakers must exceed the width of the vessel being piloted. Otherwise, the heavy-tonnage vessel will have to further expand the channel with its hull.

Fig. 3 – Simulation of heavy-tonnage tanker pilotage by two icebreakers (bottom right – channel formed by two icebreakers)
Features of movement of heavy-tonnage vessel through the "wide" channel. It should be noted that currently there are no technical means to create the "wide" ice channel for the heavy-tonnage vessels. The third-generation nuclear icebreakers of project 22220, which are now under construction, and the head icebreaker "Arctic", will be able to create ice channels with a width of BС ≤ 35 ÷ 36m, which is clearly not enough for existing vessels of the "Christophe de Margerie" type. Currently, a nuclear-powered icebreaker leader with a capacity of 120 MW is being designed [11] to be capable of laying a channel in the ice with a width of 50 ÷ 52 m, enough in width for piloting most heavy-tonnage vessels. Russian experts have been proposed with the concept of creating a multi-hull icebreaker that can create an ice channel with the width of more than 50 m [12]. The preliminary study of this proposal so far confirmed the high ice qualities of the multi-hull icebreaker and showed the principal possibility of its creation.
Currently, research on the movement of heavy-tonnage vessels through "wide" channels is carried out mainly to ensure the design of new technical means for creation of such channels. Nevertheless, the results of the performed works allow us to draw some conclusions about the features of movement of heavy-tonnage vessels through "wide" channels. Despite the external similarity of the processes of movement along the "wide" ice channel of ordinary and heavy-tonnage vessels, there is one extremely important difference between them. This difference lies in the fact that an ordinary ship always has a width less than the width of the channel, and there is enough distance between the edges of the channel and the shipside. The presence of this distance affects the way the ship's hull interacts with the broken ice in the channel. This ice is partially compacted during the movement of an ordinary vessel and moves apart to the edges of the channel. The presence of channel edges has almost no effect on the nature of the interaction of the hull with broken ice. Sinkage of broken ice by the hull is extremely rare in the presence of ice compressions and strong ice movements.
A heavy-tonnage vessel has its hull width that is comparable to the width of the channel BS ≈ BС. At the same time, the edges of the ice channel prevent the processes of ice spreading. Heavy-tonnage vessel compacts and partially pushes the broken ice in the channel in front of it. The only way to remove the broken ice that interferes with its movement is to cover it with the ship's hull and pass it under the hull. This process is quite energy-intensive, which leads to an increase in the ice resistance of a heavy-tonnage vessel when moving along the "wide" channel. The results of model tests performed in the ice basin of the Krylov research center [13] show that interaction with broken ice in the channel is the main obstacle to increasing the speed of a heavy-tonnage vessel in the "wide" channel. Well-powered vessels of the Yamal Max type cannot develop their speed equal to the speed of channel laying. There was no significant gain in trying to apply some optimization of the shape of the hull contours of a heavy-tonnage vessel, aimed primarily at improving the movement performance in the "narrow" channel (see table 2).
Table 2 – Speed of the Arc7 gas tanker with the original and optimized hull shape in the fresh channel, knots
|
Thickness of flat ice, m |
Channel behind leader icebreaker (B=47,5 m), channel width 52 m |
Channel behind icebreaker LK-60YA (B=33 м), channel width 35 m |
Comparison of the width of the channel |
|||
|
Channel behind icebreaker LK-40 (B=28,5 m), channel width 31 m |
Channel behind icebreaker “50 years of Victory” (B=28 m), channel width 30-31 m |
|||||
|
original |
optimized |
original |
optimized |
original |
optimized |
|
|
1,5 |
9 |
9,2 |
4,8 |
8,5 |
4,9 |
7,5 |
|
2,1 |
7,1 |
7,5 |
2,3 |
6,2 |
2,4 |
6,0 |
Movement of heavy-tonnage vessel through the "narrow" channel. Currently, using one icebreaker to pilot a heavy-tonnage vessel in ice leads to its movement along the "narrow" channel. For a long time, when considering the possibility of such movement, it was assumed that a heavy-tonnage vessel moved symmetrically relative to the axis of the channel [2]. However, in recent experiments with self-powered models in the Krylovsky center ice basin, a previously unknown effect of breaking the symmetry of such movement was found out. The model of the ship was placed spontaneously in the channel so that one of its sides destroyed the edge of the channel to the required width, and the other rubbed against the opposite edge. Later it was found that a similar pattern of movement of heavy-tonnage vessels was observed in full-scale conditions (see, for example, Fig. 4 [14]).

Fig. 4 . “Propontis” tanker piloted by the “Taimyr”-type nuclear icebreaker
The detected effect was studied experimentally in the ice pool and theoretically. Tests in the ice pool showed that the effect was significantly affected by the slope of the ship's side in the area of the parallel middlebody. When the angle of inclination was zero, the effect was rather vivid. When the angle of inclination was 10º, the effect could be realized or not. To find out the nature of the effect, a simple mathematical model of the observed phenomenon was developed, which allowed to calculate the longitudinal and transverse forces acting on the ship's hull when its midship line deviated from the channel axis [15, 16]. The results of the calculations showed the following.
– The ship's position symmetrical to the channel axis is stable. However, this stable position can be easily violated by relatively small external influences, such as local changes in the thickness or strength of the ice.
– After displacing relative to the channel axis by a certain amount, the vessel is constantly affected by an increasing disturbing force, which leads it to the asymmetric position. The appearance of the disturbing force is due to the peculiarity of the shape of the hull of heavy-tonnage vessels in the area of transition of forebody entrance into a parallel middlebody with straight-walled sides.
– The asymmetric position of the vessel is stable, and a significant effort must be made to remove the vessel from this position using the controls.
– A heavy-tonnage vessel that has a 10º side slope in the area of the parallel middlebody, has a more optimal hull shape. Therefore, the symmetrical position of the ship in the channel is not so easily disturbed. This can only happen with very strong random influences. The value of the disturbing force is smaller and the exit from the asymmetric position is easier.
The possibility of an asymmetric location of a heavy-tonnage vessel in the channel must be taken into account when organizing its pilotage, for example, when assigning a safe distance between ships during the piloting.
Table 2 shows the results of model studies of movement of heavy-tonnage vessels along the "narrow" channels laid by various icebreakers. During the research, we studied the interaction with ice channels of two models that were very similar in main dimensions. The main difference between the models was that one of them had a side slope in the area of the parallel middlebody, which was equal to 10º. In table 2, this model was called optimized. The peculiarity of the tests was that the ice channel was laid by the corresponding self-propelled model of the icebreaker, which were performed on the same scale as the models of heavy-tonnage vessels. In Fig.5 one of the episodes in the course of the model experiment is presented.

Fig. 5. Model studies: movement of a heavy-tonnage vessel model along the channel laid by an icebreaker model.
The results presented in table 2 allow us to draw the following conclusions.
– Received data confirm that the speed of a heavy-tonnage vessel in the channel significantly depends on its width, which, in its turn, depends on the width of the leading icebreaker. When a ship moves in a channel with width equal to or slightly greater than its width, the resistance is determined by the interaction of the hull with broken ice and individual interactions with the protrusions of the channel.
– Experimental data of the work convincingly show that it is possible to significantly increase the speed of a heavy-tonnage vessel in the "narrow" channel by purposefully optimizing the shape of its hull. In the experiments carried out, the increase in the speed of the optimized model was 2-2.5 knots.
Piloting by two icebreakers. This method of piloting heavy-tonnage vessels was the first to be used in the freezing seas of the Arctic type (Fig.3). This tactic allows to pilot in ice a vessel of almost any width. The only requirement is that the total width of the icebreakers exceeds the width of the vessel under pilotage.
When laying the wide channel in ice, icebreakers move stepwise, this way they are able to reduce the total energy consumption (Fig.6). When icebreakers move stepwise, the second icebreaker splits and shifts relatively large fragments of ice cover into the channel formed by the first icebreaker. Therefore, heavy-tonnage vessel does not move in small-broken ice, as in a normal channel, but in large-broken ice with characteristic size of 20-100 m. In order to determine the speed of the vessel's movement along the wide channel, it is necessary to have information about its ice resistance in these conditions. The Krylov State Research Centre developed effective methods for experimental and theoretical determination of ice resistance of heavy-tonnage vessel when moving in large-broken ice and in fragments of ice fields [2, 17].
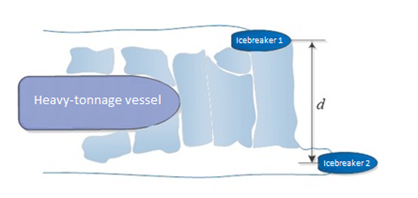
Fig. 6. Piloting heavy-tonnage vessel with two icebreakers
Piloting by two icebreakers is also preferable for overcoming areas of compressed ice. Even with very strong compressions, the probability of vessel jam in ice is small. There may be a situation where a part of the ship's hull can interact with compressed ice (Fig.7), however, in this case the vessel will be able to continue moving [18].
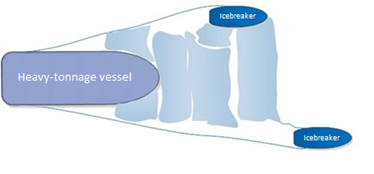
Fig. 7. Partial interaction of the vessel with the channel edges when being piloted by two icebreakers under compression conditions
There is no doubt in the efficiency and safety of piloting heavy-tonnage vessels by two icebreakers. However, due to the increased cost of pilotage and due to the lack of the necessary quantity of icebreakers for mass transport, this piloting tactic cannot be considered as the main one.
Conclusion.
The results presented in this research show that the icebreaking fleet, primarily nuclear-powered, is one of the main components of any marine transport system designed to operate in the Eastern sector of the Arctic. In order to significantly improve the efficiency of such transport system, it is necessary to create new technical means that can lay the "wide" channel in ice for heavy-tonnage vessels.
When designing new heavy-tonnage vessels intended for year-round operation on the entire route of the Northern Sea Route, it is necessary to consider the peculiarities of their interaction with piloting icebreakers. As shown by the results of studies already performed, by optimizing the shape of the hull of a heavy-tonnage vessel while maintaining its cargo capacity and power consumption, it is possible to achieve a significant increase in the speed of movement in the "narrow" channel.
The widespread introduction of new technical tools that create "wide" channels in ice will also require the search for new solutions for the shape of the hull of heavy-tonnage vessels. These solutions will have to minimize losses on overcoming the ice resistance of broken ice in the "wide" channel.
References:
1. Dekhtyaruk YU.D., Dobrodeev A.A., Sazonov K.Е. Nekotorye voprosy sozdaniya morskih transportnyh sistem dlya vyvoza uglevodorodov iz Arktiki [Some questions of development of marine transportation systems for export of hydrocarbons row materials from Arctic]. Arktika: ekologiya i ekonomika – Arctic. Ecology and economics, 2013, Issue 2(10), pp. 84-91. (in Russian)
2. Sazonov K.E., Dobrodeyev A.A. Ledovaya khodkost’ krupnotonnazhnykh sudov [Ice performance of heavy-tonnage vessels]. St.Petersburg, FGUP “Krylovskiy gosudarstvennyy nauchnyy tsentr” – Krylov State Research Centre, 2017, 122 p. (in Russian)
3. Ol'hovik Е.O. Analiz skorostnyh rezhimov SPG-tankerov v akvatorii Severnogo morskogo puti v period zimnej navigacii 2017 – 2018 gg [The analysis of LNG tankers speed regimes in the area of the North-West Pathway in the period of ice navigation from 2017 till 2018]. Vestnik gosudarstvennogo universiteta morskogo i rechnogo flota im. admirala S.O. Makarova – The Bulletin of State Univercity of Marine and River Fleet on behalf of Admiral S.O. Makarova, 2018, Volume 10, Issue 2, pp. 300-308, doi: 10.2182112309-5180-10-2-300-308. (in Russian)
4. Ol'hovik Е.O. Issledovaniya izmeneniya struktury transportnogo flota na akvatorii Severnogo morskogo puti [The researching of transport marine fleet structural changing in the area of the North-Wesy Pathway]. Vestnik gosudarstvennogo universiteta morskogo i rechnogo flota im. admirala S.O. Makarova – The Bulletin of State Univercity of Marine and River Fleet on behalf of Admiral S.O. Makarova, 2018, Volume 10, Issue 6, pp. 300-308, doi: 10.2182112309-5180-10-6-1225-1233. (in Russian)
5. Opasnye ledovye yavleniya dlya sudohodstva v Arktike [The ice hazards for ship sailing in Arctic]. Pod. red. d.g.n. Е.U.Mironova. GNC RF AANII – State scientific Centre of Russian Federation of Arctic and Antarctiv Research Institute, 2010, 320 p. (in Russian)
6. Pustoshnyy A.V., Sazonov K.E. Problemy, svyazannyye s uvelicheniyem skorosti kruglogodichnoy raboty krupnotonnazhnykh transportnykh sudov v Arktike [Issues related to higher speeds of heavy-tonnage carriers during their year-round operation in the Arctic]. Arktika: ekologiya i ekonomika – Arctic. Ecology and economics, 2017, Issue 3 (27), pp.103-110. (in Russian). DOI 10.25283/2223-4594-2017-3-103-110
7. Pustoshnyy A.V., Sazonov K.E. Zadachi sudostroitel’noy nauki na sovremennom etape osvoyeniya Arktiki [Challenges to shipbuilding science on the actual stage of Arctic development]. Vestnik Rossiyskoy Akademii nauk – The bulletin of Russian Academy of Sciences, Volume 85, Issue 7, 2015, pp.593-597. (in Russian).DOI:10.7868/S0869587315070051
8. Coj L.G., Andryushin A.V., SHtrek A.A. Obosnovanie osnovnyh parametrov perspektivnyh krupnotonnazhnyh gazovozov dlya Arktiki [The justification of the main parameters in Arctic heavy-tonnage vessels design]. Problemy Arktiki i Antarktiki – The problems of Arctic and Antarctic, 2013, Issue 3(97), pp. 46-56. (in Russian)
9. Su B., Skjetne R., Berg T. E. 2014. Numerical assessment of a double-acting offshore vessel's performance in level ice with experimental comparison. Cold Reg. Sci. Technol. 106-107, 96–109.
10. HuangY., SunJ., JiS.,TianY. Experimental Study on the Resistance ofaTransport Ship Navigating in Level Ice. /J. Marine Sci. Appl. (2016) 15: 105-111. DOI: 10.1007/s11804-016-1351-0
11. Kashka M.M., Smirnov A.A., Golovinskij S.A., Vorob'ev V.M., Ryzhkov A.V., Babich Е.M. Perspektivy razvitiya atomnogo ledokol'nogo flota [The development perspectives in nuclear icebreaker fleet]. Arktika: ekologiya i ekonomika – Arctic. Ecology and economics, 2016, Issue 3(23), pp. 98-109. (in Russian)
12. Pashin V.M., Appolonov Е.M., Sazonov K.Е. Novyj ledokol dlya provodki krupnotonnazhnyh sudov. V chem preimushchestva? [New icebreaker for heavy-tonnage vessels escorting. What are the advantages?]. Morskoj flot – Marine fleet, Issue 1, 2012. 50p. (in Russian)
13. Dobrodeev A.A., Sazonov K.Е. Provodka krupnotonnazhnyh sudov ledokolami s uvelichennoj skorost'yu: issledovaniya v ledovom bassejne [The heavy tonnage vessels escorting by icebreakers at increasing speeds: investigations in ice model tank ]. Arktika: ekologiya i ekonomika – Arctic. Ecology and economics, 2018, Issue 3(31), pp. 76-83. DOI: 10.25283/2223-4594-2018-3-76-83
14. Ruksha V.V., Belkin M. S., Smirnov A. A., Arutyunyan V. G. Struktura i dinamika gruzoperevozok po Severnomu morskomu puti: istoriya, nastoyashcheye i perspektivy [Structure and dynamics of cargo shipments via the Northern Sea Route: past, present and future]. Arktika: ekologiya i ekonomika – Arctic. Ecology and economics, 2015, Issue 4 (20), pp.104-110. (in Russian)
15. Dobrodeev A.A., Klementyeva N.Yu., Sazonov K.E. Nesimmetrichnoye dvizheniye krupnotonnazhnykh sudov v «uzkom» kanale [Assimmetrical moving of heavy-tonnage vessels in «narrow» ice channel]. Problemy Arktiki i Antarktiki – Arctic and Antarctic problems, 2018, Volume 64, Issue 2, pp. 200-207. (in Russian). DOI: 10.1088/1755-1315/193/1/012017
16. Dobrodeev A.А., Klementyeva N.Y., Sazonov K.E. 2018. Large ship motion mechanics in «narrow» ice channel. IOP Conf. Ser.: Earth Environ. Sci. 193 012017. DOI: 10.1088/1755-1315/193/1/012017
17. Sazonov K.Е., Dobrodeev A.A. Metod rascheta ledovogo soprotivleniya sudna pri ego dvizhenii v krupnobityh l'dah i oblomkah ledyanyh polej [The method of ship ice resistance calculation when moving in broken ice and ice floes]. Trudy CNII im. akad. A.N. Krylova – The proceedings of Central scientific research Institute on behalf of academic A.N. Krylov, 2011, Issue 63(347), pp. 73-80.
18. Bokatova Е.A., Sazonov K.Е. Raschet skorosti dvizheniya sudna po ledyanomu kanalu v usloviyah szhatiya pri chastichnom vzaimodejstvii bortov s ego kromkami [The calculation of ship speed moving in compressive ice channel when the hull partly interacts with ice edges]. Trudy CNII im. akad. A.N. Krylova – The proceedings of Central scientific research Institute on behalf of academic A.N. Krylov, 2012, Issue 66(350), pp. 43-46.

")
")
")
")
